SuperVR

Proyecto SuperVR, referencia: TEC2017-83769-R, financiado por el Ministerio de Ciencia, Innovación y Universidades. Programa Estatal de I + D + i Orientada a los Retos de la Sociedad, en el marco del Plan Estatal de Investigación Científica y Técnica y de Innovación 2013-2016. Convocatoria 2017.

En la actualidad, existe una nueva generación de cascos asequibles de Realidad Virtual (RV) en el mercado (Oculus, HTC-Vive, Samsung Gear, etc.). Sin embargo, los cascos de RV aún tienen que superar algunos desafíos técnicos para proporcionar la calidad necesaria en las aplicaciones de futuro, como la educación, oficina personal o en entornos profesionales (marketing virtual, diseño 3D, arquitectura, entrenamiento para tareas complejas , etc.).
Retos
Los principales desafíos a los que se enfrentan un prototipo de casco RV son:
1) Resolución: los cascos de la actualidad permiten unas densidades de resolución <200 píxeles / grado2. Esto hace muy difícil la lectura de textos (críticas en aplicaciones de escritorio) o reconocer caras (determinante en aplicaciones sociales, visionado de películas o aplicaciones profesionales).
2) Tamaño, peso y ergonomía: los cascos de RV son aparatosos (la mayoría por encima de los 1.200 cm3) y pesados (cerca de 500 g), lo que los hacen incómodos de utilizar durante largos períodos de tiempo.
3) Campo de visión (FOV en inglés): una visualización realmente inmersiva necesita un FOV mínimo de 90º, aunque uno más grande aumenta enormemente la inmersividad de la experiencia.
Alcance
Los cascos de RV en el mercado tienen en común que todos ellos utilizan ópticas convencionales (con simetría rotacional y superficies asféricas, Fresnel o difractivas). La óptica convencional presenta las siguientes desventajas:
a) Existe un compromiso entre el FOV y el tamaño del casco. Los FOVs más grandes permiten mejores experiencias inmersivas, pero necesitan mayores distancias entre la óptica y las pantallas, lo que hace que el casco sea aparatoso y pesado.
b) La resolución, limitada por la pantalla utilizada, no puede seguir mejorando con la óptica convencional. Las pantallas actuales permiten resoluciones <Megapixels / ojo, por lo que las resoluciones máximas que pueden alcanzarse encuentran por debajo de 200 píxeles / grado2.
El proyecto SuperVR investigará nuevas arquitecturas ópticas freeform para mejorar la resolución, usando configuraciones mono y multicanal. Se seguirán tres aproximaciones diferentes:
- Super-resolución basada en diseños adaptados a la visión humana con aumento variable. Esta aproximación puede ser compatible con ópticas mono y multicanal y con cualquier frecuencia de actualización de pantalla.
- Super-resolución basada en Multiplexación por División en el Tiempo (MDT). Funciona con ópticas mono y multicanal, pero necesita frecuencias de actualización de pantalla superiores a 120Hz.
- Super-resolución basado en entrelazado de píxeles. Para sistemas multicanal, con mayor número de canales (> 50) y cualquier frecuencia de refresco
El proyecto SuperVR se centrará en la investigación de nuevas ópticas freeform para mejorar la resolución de los cascos de RV. Un estudio teórico se llevará a cabo, incluyendo las 3 posibles arquitecturas mencionadas. Para cada arquitectura se desarrollará un diseño práctico y un sistema óptico completo que se fabricará y probará, de acuerdo a los requisitos de cada arquitectura. El sistema óptico se integrará en un prototipo de casco RV y se probará en un escenario profesional que pueda ser utilizado en la industria.
Escenario RV
Para probar las diferentes arquitecturas de los sistemas ópticos desarrollados en el proyecto SuperVR, el Grupo de RV del CeDnt ha modelado e Implementado un escenario virtual basado en la solución "Open IoT" de dispositivos inteligentes y de eficiencia energética desplegados en el Campus de Montegancedo. La monitorización y control de los dispositivos de iluminación, consumo y presencia desarrolados por el grupo de Eficiencia Energética . Hay tres pilotos implementados en el campus de Montegancedo con los que se puede interactuar en este escenario: Smart Lighting, Sala Demo y Smart Building. Estos proyectos comprenden 5 redes inalámbricas a los que se conectan un total de 222 nodos entre sensores y actuadores. Más información puede consultar aquí.

Figura 1. Vista general del Campus de Montegancedo donde está desplegada la solución "Open IoT"
El escenario virtual permite la selección de cualquiera de los pilotos mencionados como así también cambiar parámetros de configuración relacionados con la comunicación con los dispositivos reales mediante una interfaz tal como se muestra en la siguiente figura.

Figura 2. Escena home que permite seleccionar entre los diferentes pilotos
SmartLighting: Este piloto pretende mejorar las instalaciones de iluminación exterior del CEI de Montegancedo, dotándole de un sistema de iluminación inteligente capaz de medir el nivel de luminosidad reflejada bajo la luminaria y de detectar la presencia de viandantes.
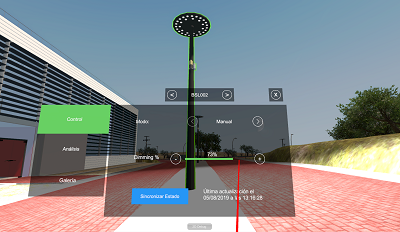

Figura 3. Interacción con una farola del piloto Smart Lighting para controlar su nivel de iluminación y observar el histórico de luminosidad detectado.
Sala Demo: Con el fin de demostrar la interoperabilidad entre las diferentes tecnologías domóticas presentes en el mercado y estableciendo siempre el ahorro y la eficiencia energética como prioridad, esta sala dispone de las tecnologías de control más extendidas en la actualidad (LonWorks, KNX, DALI, BACnet y X10).
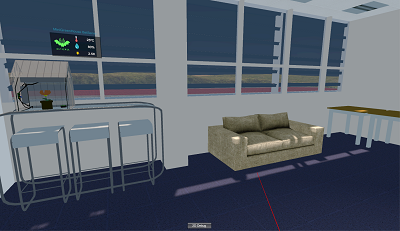

Figura 4. Interacción con las tecnologías domóticas de la Sala Demo (mini invernadero con sensor de temperatura, humedad y luminosidad y control de iluminación)
Smart Building: tiene como objetivo presentar un estudio en profundidad del comportamiento desde el punto de vista de la eficiencia energética en los edificios. Dispone de 40 BatSenses que miden temperatura, humedad, luminosidad, ruido ambiental y potencia; 30 BatMeters trifásicos que miden el consumo energético de 540 circuitos independientes del edificio; un BatWater que incluye un flujo volumétrico de agua y sensores de calor; un BatLamp que controla la longitud de onda emitida de un LED genérico; y una Estación meteorológica.

Figura 5. Vista interior del edificio CeDInt donde está desplegada la red de dispositivos

