GUAKS

")
This project has been subject of funding on the budget of the Ministerio de Economía, Industria y Competitividad, file number RTC-2014-2091-7
The objective of the project is the development of a Head Mounted Display (HMD) system, compact and with large field of view.
The technology of GUAKS project fall within the Near to Eye information visualization systems.
The ideal HMD should combine affordable cost, high resolution, large field of view, low weight and small size. Although some of the current technologies optimize some of these factors, there is not a solution that combines all these requirements.
The results expected from the project are two different prototypes with different technical characteristics and, accordingly, different application fields:
- GUAKS-PLAY. Using one flat transmissive LCD per eye (500-600 pixels per inch and freeform refractive optics. The specific objectives will be the design and manufacturing of prototypes with resolution better than 6 cycles/degree, field of view > 120º, volume < 50cm3, weight <100g and total delay < 30 ms.
- GUAKS-PRO. It will be designed to operate with one high resolution display per eye, together with freeform and achromatic optics. The specific objectives will be the design of proof of concept prototypes, with resolution better than 20 cycles/degree, field of view >140º, volume < 30 cm3, weight < 75g and total delay <20ms.
The above mentioned characteristics make the proposed system unique and disruptive compared to the state of the art, thanks to the following items covered by the project:
- Pioneer use of freeform microlenses, designed with the breakthrough technologies developed by the Optical Engineering Group of UPM. These technologies will allow the projection in a very limited space of the virtual image, with a large field of view, without the need of eye-tracking and adapting to the resolution of the human eye, optimizing the degrees of freedom available.
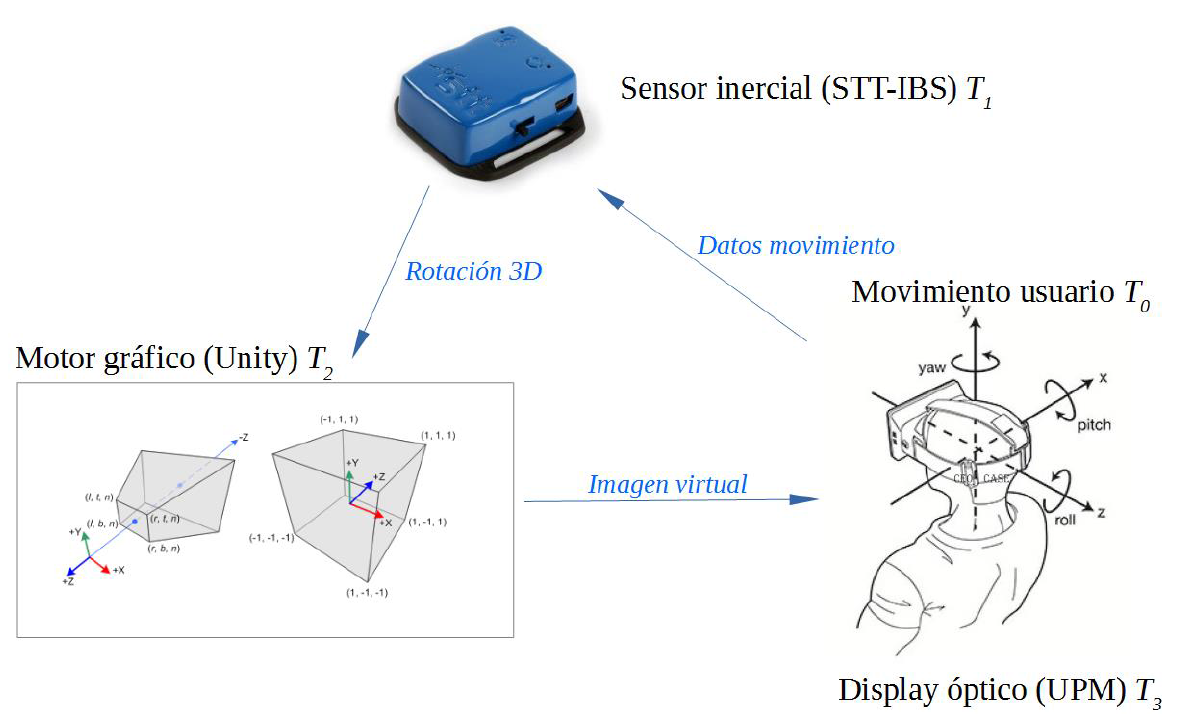
- Use of several tracking technologies based on inertial systems or optical low latency systems. The inertial systems will use three sensors integrated in the electronics: magnetometer, accelerometer and gyroscope. These three sensors provide a total of 9 signals, combined with a Kalman filter, thus providing the orientation of the object to be tracked. This technology can be embedded in the electronics of the system, creating a compact and flexible solution.
- Definition of a new hardware addressing method of the display using massive parallelism techniques.
In years 2014 and 2015, the project has achieved important progress in all the tasks:
- Full definition of the requirements for GUAK-PLAY and GUAK-PRO.
- Design, manufacturing and lab characterization of GUAK-PLAY optics. Manufactured by plastic injection molding to analyze the possibilities of mass manufacturing, and measuring the quality of the lenses obtained.

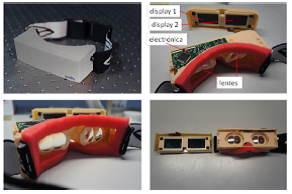
- Design, implementation and verification of the tracking system for GUAK-PLAY. The sensor was integrated in the VR glasses, measuring the absolute rotations of the glasses with respect to an inertial system.
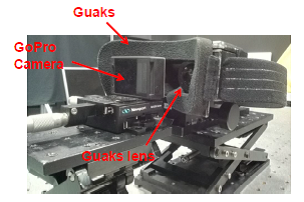
- Design and implementation of mapping algorithms for GUAK-PLAY. In order to calculate the mapping algorithm, a lab set up has been built, to measure the distortion of the lenses of GUAK-PLAY. This distortion defines the mapping functions between the image seen by the user and the image sent to the displays.
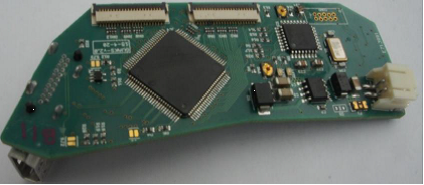
- Design and manufacturing of the control electronics for GUAK-PLAY. Two different versions of the electronics have been designed and manufactured. The second one, including improvements in the electronics and ergonomics, to guarantee the integration in a compact headset.
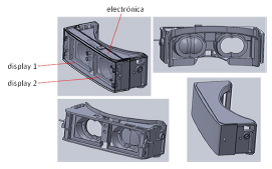
- Mechanical design and manufacturing by fast prototyping of the holders of GUAK-PLAY. The holders will be designed to guarantee that the VR headsets is compact and lightweight. The prototypes have been manufactured by high precision 3D printing, because of its versatility, precision and low cost to obtain a prototype.
- Integration of GUAK-PLAY prototype, together with qualitative operation tests.